分布式之Raft
前言
当下,分布式是一大热门,常用场景比如分布式数据库等。在错综复杂的分布式网络环境中,不同节点间的数据(也被称为状态)很可能不一致,原因比如:传输时数据丢失、节点崩溃等等。分布式中所要解决的一大问题,就是节点间如何达成共识,也就是如何保证各节点数据的一致性。最容易想到的方法是,选择一个主节点,其它节点与主节点状态保持一致。但致命的问题在于,主节点崩溃了怎么办?如何选取新的主节点?如何保证新主节点的数据是正确的?这些都需要一个完整的算法机制。
Raft是当下最流行的崩溃容错共识(CFT)/分布式一致性算法之一,被广泛应用于分布式数据库中,比如k8s中的etcd。本文主要是对Raft论文中关键内容的摘取翻译,并附加自己的理解。
Raft论文:Ongaro D, Ousterhout J. In search of an understandable consensus algorithm[C]//2014 {USENIX} Annual Technical Conference ({USENIX}{ATC} 14). 2014: 305-319.
论文解读
Abstract
Raft是一种用于日志复制共识算法,与Paxos作用相同、效率相同,但它的结构与Paxos不同,也比Paxos更容易理解、更容易实现。
Raft分离了共识的核心部分,比如:领导人选举、日志复制、安全性,同时增强了一致性程度以减少需要考虑的状态数量。
In order to enhance understandability, Raft separates the key elements of consensus, such as leader election, log replication, and safety, and it enforces a stronger degree of coherency to reduce the number of states that must be considered.
Raft包括了一种新机制,通过重叠大多数保证集群成员变动的安全性。
Raft also includes a new mechanism for changing the cluster membership, which uses overlapping majorities to guarantee safety.
1 Introduction
在共识算法领域,Paxos的统治地位可见一斑:
Paxos [15, 16] has dominated the discussion of consensus algorithms over the last decade: most implementations of consensus are based on Paxos or inflfluenced by it, and Paxos has become the primary vehicle used to teach students about consensus.
但,Paxos晦涩难懂且难以实现。
为了让Raft算法更易于理解,作者使用了分解与减少状态数的方法。
Raft在很多方面与现有共识算法很相似(比如Oki和Liskov的视图戳复制Viewstamped Replication),但也有许多新颖的功能:
- Strong leader
- Leader election:Raft使用随机定时器来选举leader。
- Membership changes:使用joint consensus的新方法处理集群中服务器的变动。
第2节介绍复制状态机的问题(replicated state machine problem);第3节讨论Paxos的优缺点;第4节描述实现易理解性的大体方法;第5-8节讲解Raft算法;第9节测评Raft算法;第10节讨论最近的相关工作。
2 Replicated state machines
在分布式系统中,常用复制状态机(replicated state machine)解决容错问题。比如,在只有一个leader的大型系统中,通常会使用独立的复制状态机,去管理leader的选举与配置信息的存储(防止leader崩溃)。
复制状态机通过日志实现,每个服务器上的日志保存着一系列命令,服务器上的状态机(state machine)会顺序执行这些命令。每个日志中的命令序列都是相同的,因此每个状态机都执行相同顺序的命令,并得到相同的状态和输出。
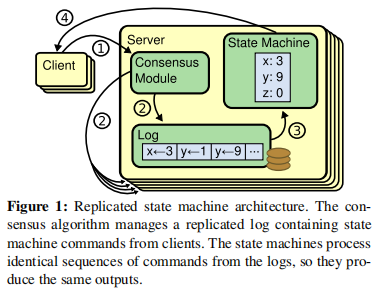
复制状态机中,共识算法是为了保证日志的一致性。当服务器上的共识模块(consensus module)收到客户的命令后,会将命令添加到它的日志中,并与其它服务器上的共识模块通信,以保证每个日志中命令序列都是相同的。一旦日志被正确地复制,每台服务器上的状态机就会执行日志中的命令,并将结果返回给客户端。
在实际系统中,共识算法通常有以下特性:
- 在非拜占庭情况下,保证安全性(不返回错误的结果)。
- 在大多数节点可用的情况下,保证可用性。比如5个节点的集群可容忍2个节点的失效。并且,当节点失效时,它们可以恢复并重新加入集群。
- 不依赖时间来保证日志的一致性(?)。
- 只要大多数节点返回响应,命令就算完成,少数较慢的节点不会影响系统性能。
3 What’s wrong with Paxos?
过去十年,Paxos就是共识的代名词。
Paxos首先定义了能就单个决策达成共识的协议,被称为单决策Paxos(single-decree Paxos)。然后Paxos组合该协议的多个实例以实现一系列决策,被称为multi-Paxos。
Paxos有两个显著的缺点:
- 难以理解。论文假定Paxos的复杂性源于它以单决策子集为基础,而单决策Paxos是复杂的。它分为两个阶段,没有简单直观的解释,也无法单独地去理解。因此,这导致multi-Paxos更难以理解。作者相信有更直接显著的方法,就多项决策达成共识。
- 难以具体实现。一个原因是Lamport(Paxos作者)仅构想了实现multi-Paxos的可能方法,但许多细节有所欠缺。此外,Paxos的架构很难应用到实际系统中。
许多系统实现都从Paxos开始,但发现实现上存在困难,然后开发成另一种不同的架构。
为了解决这些,论文设计了Raft。
4 Designing for understandability
设计Raft时的一些目标:
- 必须易于实现。
- 必须在所有情况下保证安全性,在常见情况下保证可用性。
- 对于普通操作必须高效。
- 易于理解(最大的目标与挑战)。
使用两种方法来实现易于理解:
- 问题分解
- 减少状态数
5 The Raft consensus algorithm
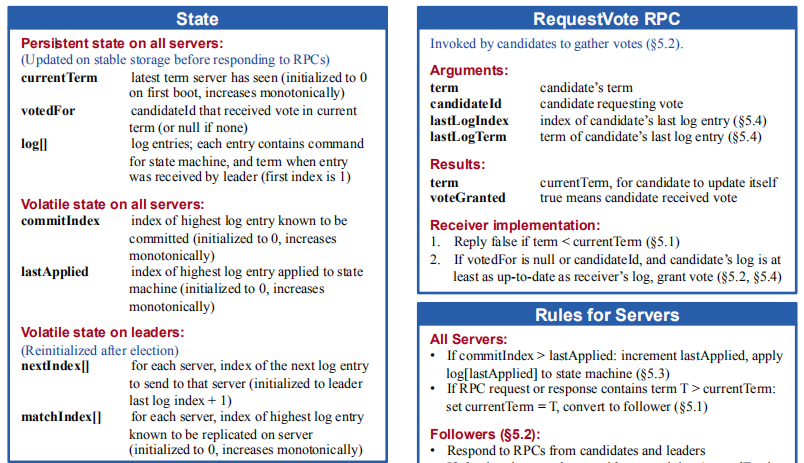
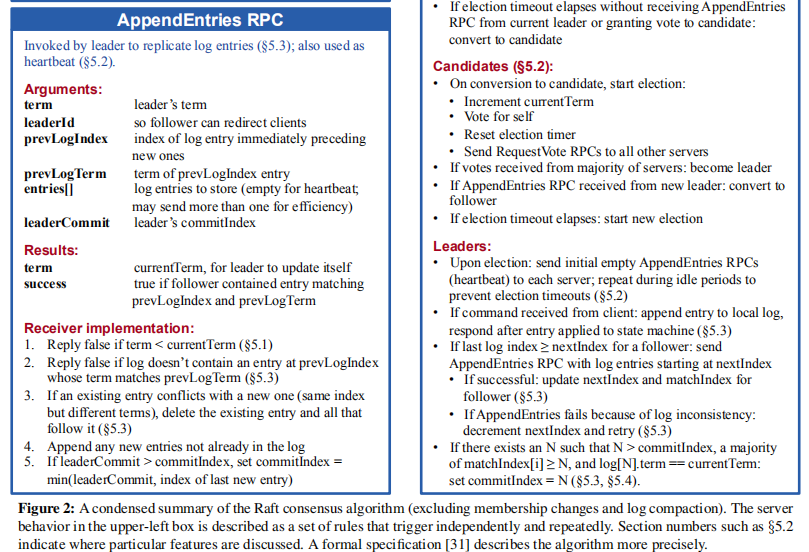
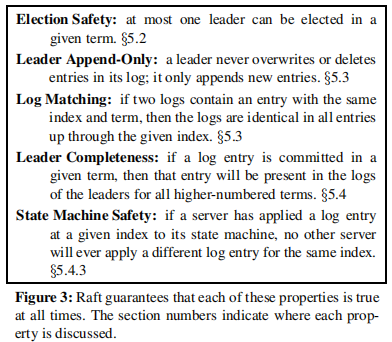
Raft是一种用于管理第2节中可复制日志(replicated log)的共识算法。图2是算法的压缩总结,以供参考。图3列举了算法的关键属性。
Raft首先会选举一个独立的leader,让leader全权负责日志复制。leader从客户端获取命令(日志记录 log entries),然后将其复制给其它服务器,并告诉其它服务器什么时候执行才是安全的。当leader失效时,会选举出新的leader。
通过leader机制,Raft将共识问题分解为三个子问题:
- Leader election(5.2节)
- Log replication(5.3节)
- Safety:在日志中的同一位置,不同服务器上的状态机应执行相同命令(5.4节)
在介绍了共识算法之后,本节将讨论可用性和定时(timing)在系统中的作用。
5.1 Raft basics
Raft集群包含多个节点,通常有5个节点就能容忍2个节点出错。
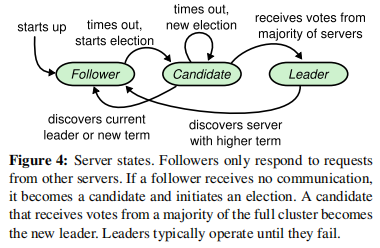
任意时刻,集群中节点只有三种状态:leader、follower、candidate。在正常情况下,有一个leader,其它都是follower。follower节点不发出请求,只响应leader或candidate的请求。leader节点处理所有客户端请求,如果follower收到客户端,会转交给leader。candidate状态则用于leader选举。各状态间的相互转换如下图:
如下图,Raft将时间分为不同长度的任期(terms),terms的序号是连续的。每个term都开始于一次选举election,选举中一或多个candidate竞争一个leader,如果某个candidate赢得选举,将在当前term的剩余时间内担任leader。
在某些情况下,可能会出现相等的票数(比如A和B都得到3票),那么当前term就会以无leader的情况(no leader)结束,一个新的term很快就会开始。Raft会保证一个term最多只有一个leader。
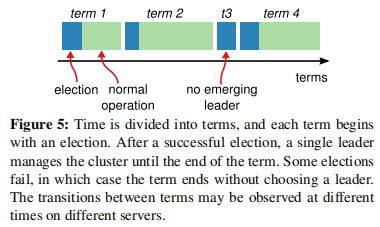
不同节点可能在不同时间察觉到term的变动,在某些情况下,节点甚至察觉不到某次选举或整个term。
在Raft中,terms扮演了逻辑时钟的角色,可以让节点发现一些过期的信息,比如已失效的leader。
每个节点都保存着一个当前term序号(current term number),并随着时间递增。当节点进行通信时,会交换当前term的序号,如果节点发现它的term序号较小时,它会将其更新成那个较大的值。当leader或candidate发现它的term已过期时,它会立即变为follower状态。如果节点收到一个携带已过期term序号的请求,它会拒绝这个请求。
Raft中,节点间使用RPCs通信,最基础的共识算法只需要两种类型的RPCs:
- RequestVote RPCs,由candidate发起,用于选举。
- AppendEntries RPCs,由leader发起,用于复制日志和心跳提醒。
5.2 Leader election
Raft采用一种心跳机制来触发leader选举。当节点刚启动时,它处于follower状态。当它收到来自candidate或leader的RPC请求时,它会保留为follower状态。因此,leader会定期地发送心跳提醒(heartbeats)给所有follower,以维持它的统治。当follower在一段时间内(election timeout)都没有收到消息时,它会假定当前leader已失效,然后开始新的竞选。
当开始竞选,follower会将当前term序号加1,然后转变为candidate状态。它先会投票给自己,然后并行地发送RequestVote RPC请求给其它节点。直到以下三种情况出现,节点才会改变candidate状态:
- 节点赢得选举。
- 其它节点成为leader。
- 一个周期时间过去任未选出leader。
当candidate节点得到集群中大多数节点针对当前同一term的投票,它将赢得选举胜利。在一个term内,节点只能对最多一个candidate进行投票,并遵循先到先得的原则。得到大多数投票,能保证在一个term内,最多只有一个candidate获胜。一旦某个candidate获胜成为leader,它将定期发送心跳heartbeats信息给其它所有节点,以维持它的统治。
当candidate在等待投票过程中,收到刚成为leader节点的AppendEntries RPC请求,且请求的term序号大于等于它的term序号时,它将会认可这个leader的合法性,并转变为follower状态。如果请求的term序号小于它的term序号时,它会拒绝请求并保持candidate状态。
当没有candidate胜出,比如大多数follower同时变为candidate,导致没有candidate能获得大多数投票时,每个candidate都会等待超时,然后将当前term序号加1,开始新一轮的竞选。当然,如果没有额外的措施,这种情况可能无限重复。
Raft使用随机化的选举等待时间来解决上述**投票分裂(split votes)问题:每个candidate节点开始竞选时,会从某个区间(比如150-300ms)内随机选择选举等待时间(election timeout)**。这将导致在大多情况下,只有一个节点率先超时进入下一次选举,并在其它节点超时之前赢得选举。
5.3 Log replication
一旦某个leader被选举出来,它将处理客户端请求。每个客户端请求包含一条可被复制状态机执行的命令。leader会将这条命令追加到它的日志中,然后并行地发送AppendEntries RPCs请求,复制这条命令给其它节点。当这条命令被安全地复制,leader将让它的状态机执行这条命令,并返回结果给客户端。如果followers崩溃或网络堵塞,leader将会重复地发送请求,直到所有follower都保存了这条命令。
日志如下图所示,类似于有序数组,日志中每条记录都包含一条命令和对应的term序号。
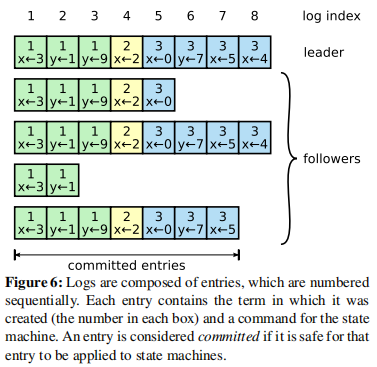
如果某条日志记录可以安全地执行,那leader会标记这条记录为已提交的(committed)。Raft会保证已提交的记录是持久的(不会被删除或覆盖),且最终被所有节点执行。当记录被复制到大多数节点时,它就可以被标记为已提交的,比如上图中的第7条记录。leader会保存日志中已提交记录的最大索引,比如上图中最大已提交索引为7。它会在AppendEntries RPCs请求中包含这个值,以便让其它节点知晓。一旦某个follower节点得知某条记录已提交,它便会执行记录中的命令(按日志中记录的顺序)。
Raft会维持如下特性,这些特性构成了图3种的**日志匹配属性(Log Matching Property)**:
- 如果不同日志中的两条记录拥有相同的索引和任期号,那么它们存储了相同的指令。
- 如果不同日志中的两条记录拥有相同的索引和任期号,那么它们之前的所有日志条目也都相同。
一个任期号至多对应一个leader,且leader在任期号内的一个索引处只能创建一条记录,这保证第一条特性。第二条特性由AppendEntries RPCs请求时一致性检查保证:当leader发送AppendEntries RPCs请求时,会将新日志记录的上一条记录的索引和term号(其实就是已提交记录的最大索引和其term号)包含在内。如果follower在它日志中没有找到相同的索引和term号,它就会拒绝请求(保证一致性)。
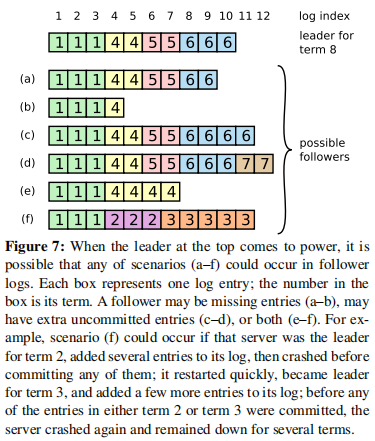
在某些情况下,旧leader发生崩溃,那么新的leader与follower日志可能不同:新leader中的日志记录可能比某些follower多,也可能比某些follower少。
Raft中,leader通过强制follower的日志保持与自己一致,来解决不一致问题(5.4节将解释,当附加了一个至多个限制时,这是安全的)。
leader为了让follower的日志与自己一致,会找到两者日志中一致且索引最大的记录,然后删除follower日志中的剩余记录,再将leader日志中剩余记录追加到follower日志中。
leader为每个follower都维护了一个**下一个索引值(nextIndex)**,用于标识下一个将发送给follower的日志记录。当leader首次启动时,它会初始所有nextIndex为它日志中最后一条记录的下一个索引。如果follower的日志与leader的不一致,AppendEntries RPC请求将会失败。当leader收到拒绝响应时,它会将follower对应的nextIndex减1,然后再重试。最终,nextIndex会达到leader和follower中日志相一致的索引处。此时,AppendEntries RPC请求将成功响应,follower会删除冲突的部分,并将leader发来的记录追加到它的日志中。
这部分算法可以被优化:当follower发现不一致时,返回term序号和term内的第一个索引,leader借此可以跳过这个term。但在实践中,作者发现这种优化没有必要,因为失败不经常发送,且冲突记录并不多。
通过这种机制,既能保证一致性,又能保证少数过慢的机器不会影响系统性能。
5.4 Safety
上述机制还存在一个问题:不能保证每个节点都按相同顺序执行了相同的命令。比如,某个follower处于失效状态时,leader提交了多条日志记录,而后这个follower生效被选为新leader,它将覆盖这些已提交的记录。
本节通过对leader选举进行限制,来完善Raft算法。这种限制能保证:在任意term内,leader都包含了之前各term内已提交的日志记录。
5.4.1 Election restriction
在选举时,Raft规定只有日志中包含所有已提交记录的candidate才能赢得竞选,这就意味着所有已提交记录必须至少存在于一个节点上。
如果candidate的日志至少与大多数节点的日志一样**新(up-to-date)**,那么它就拥有全部的已提交记录。
这个投票限制通过RequestVote RPC请求实现:RPC请求会包含candidate的日志信息,如果投票者的日志比candidate的新,它就会拒绝投票。
Raft通过比较两个日志中最后一条记录来判断谁更新:term序号大的更新;term序号相等但日志更长的更新。
5.4.2 Committing entries from previous terms
由上文可知,leader只有得知大多数节点保存了当前日志记录后,才会提交该记录。如果leader在提交该记录前崩溃了,那么新leader会尝试继续完成该记录的复制。然而,如果前一条记录被复制到大多数节点,leader也无法判断该记录是否已提交。下图展示了在旧leader下被复制到大多数节点的记录,可能被新leader覆盖。
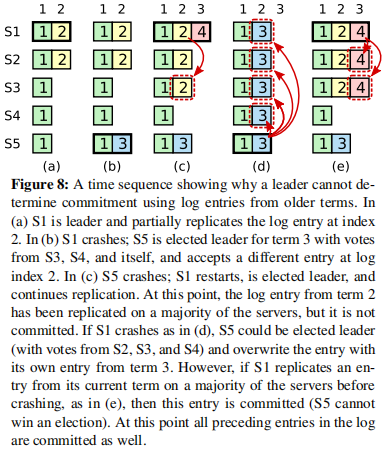
图8描述了一种情况:(a)中,S1被选为leader(term 2),复制2索引处的记录到S1、S2。(b)中,S1崩溃,S5被选为leader(term 3),投票来自S3、S4、S5,它在2索引处获得新记录。(c)中,S5崩溃,S1重新被选为leader(term 4),为了保证日志一致,它会继续复制索引2处term 2内的记录到其它节点,如果得到超过半数的复制成功响应,它就会提交该记录(也意味着会执行该记录)。但在(d)中,S1崩溃,S5重新选为leader,它也会继续复制索引2处term 3内的记录到其它节点,此时,就会覆盖索引2处term 2的已提交记录(S1执行过的命令被覆盖,违背持久性)。如果,回到(c)中,S1复制索引2处term 2内的记录到其它节点,得到大多数成功响应,但并不标记这个记录为已提交,而是等到自己term内的记录复制到大多数,才标记自己term内的记录已提交,那就会避免这个问题,既能提交旧term内的记录,也能保证一致。
为了解决这个问题,Raft不会通过统计是否复制到大多数节点,来提交之前任期(term)内的日志记录。只有当前term内的日志记录,才会通过统计是否复制到大多数节点来提交。因为,一旦当前term内的记录被提交,所有此前的记录都会被提交(参考5.3节)。
5.4.3 Safety argument
此节讨论Raft的安全性,主要通过反证法进行论证。假设任期T内的leaderT在任期内提交了一个日志记录,但是该日志记录没有被存储到未来某个任期U的 leaderU 中,然后反证这种情况不可能发生。
详细内容略。
5.5 Follower and candidate crashes
如果follower或candidate崩溃,发送给它们的RPC请求会无限重试,直到它们重启后成功响应。
5.6 Timing and availability
Raft中,系统的安全性不能依靠定时:不能因为某些事件发生得过慢或过快,就产生错误的结果。但是系统的可用性(规定时间内响应用户)却必须依靠定时,比如:消息传播过慢,导致candidate没有足够时间赢得选举,进而导致选不出稳定的leader。
定时是leader选举的关键,为了选举并维持一个稳定的leader,系统必须满足如下定时需求:
广播时间(broadcastTime) << 选举超时时间(electionTimeout) << 平均故障间隔时间(MTBF)。
广播时间是节点并行地发生RPC请求且收到响应的平均时间;选举超时时间参考5.2节;MTBF是节点故障恢复的平均时间。广播时间应该比选举超时时间小一个量级,这样 leader 才能通过发送心跳消息来阻止 follower 开始进入选举状态。选举超时时间应该比平均故障间隔时间小上几个数量级,这样才能在leader崩溃期间,快速选出新leader保证系统可用。
广播时间和MTBF由具体情况而定,但选举超时时间可自定义。通常,广播时间大约是0.5ms-20ms,因此选举超时时间可定义为10ms-500ms。
6 Cluster membership changes
实际中,某些时刻需要更新系统的配置(系统节点信息),即集群变更,比如某些节点永久失效需要被替换时。一个方法是将所有节点下线,更新完成后再手动重启,但这样会导致系统某段时间不可用。此外,通过手动操作也会产生意料之外的错误。于是,Raft针对集群变更设计自动化机制。
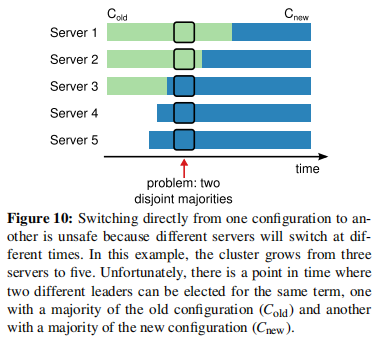
当然,在集群变更过程中,会产生一些问题:由于一次性改变所有节点配置是不可能的,那么在某个时刻,旧配置节点与新配置节点共存,可能出现两个leader。如下图,1、2在旧配置(只有3个节点)中,3、4、5在新配置(有5个节点)中,1获得了2的投票,它就会认为得到大多数投票,成为leader;而5获得3、4的投票,它也会成为leader。这样同一时刻就有两个leader。
为了保证集群变更时的安全性,需使用两阶段(two-phase)方法。这种方法有许多实现方式,比如:一些系统,在第一阶段先停止旧配置节点,让其不能接收请求;然后在第二个阶段启动新配置节点。
在Raft中,集群首先切换到一个中间状态,称为联合一致(joint consensus)。一旦joint consensus被提交,系统就可以过渡到新配置。在joint consensus状态中,系统同时包含旧配置和新配置,并遵循以下机制(相当于旧新配置的并集):
- 日志会复制到新旧配置中的所有节点。
- 新旧配置中的节点都可以成为leader。
- 选举和日志提交,既需要得到旧配置中大多数节点的同意,也需要得到新配置中大多数节点的同意。这能保证新旧配置leader不会同时出现,比如上图10中,5想要成为leader,就需要同时得到旧配置(1、2、3)下的大多数投票,和新配置(1、2、3、4、5)下的大多数投票。
集群配置作为特殊的日志记录进行存储。下图展示了配置变更过程。当leader收到配置变更的请求($C_{old}$→$C_{new}$)时,它会将中间态配置$C_{old,new}$(相当于新旧配置的并集)存储为一个日志记录,然后按照如上机制复制到系统其它节点。(一旦节点添加了新的配置记录到日志中,它将会使用该配置进行未来的全部决策。且节点总是使用日志中最新的配置记录,无论该记录是否提交)。leader会使用$C_{old,new}$配置来判断$C_{old,new}$记录是否已提交,如果leader宕机,一个新的leader会从$C_{old}$或$C_{old,new}$配置的机器中选出。在任何情况中,$C_{new}$的配置都不会产生任何决策。
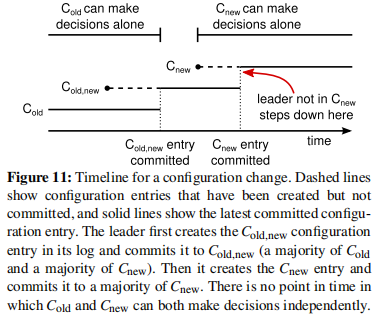
一旦$C_{old,new}$配置已提交,不管$C_{old}$或$C_{new}$配置的节点都不能单独决策(因为按照中间态的机制,决策既要得到旧配置中大多数节点的同意,也需要得到新配置中大多数节点的同意)。且$C_{old,new}$配置已提交能保证它被复制到大多数节点,即只有$C_{old,new}$配置的节点才能选为leader。此时,leader可以安全地创建$C_{new}$配置的日志记录,并复制到集群。当$C_{new}$配置被提交,不在新配置下的节点将被关闭。
关于配置变更还有3个问题:
- 新节点没有存储任何日志记录。新节点刚加入系统时,需要一段时间赶上进度。为了避免这段时间系统不可用,Raft在配置变更阶段之前引入一个新阶段。在这个阶段中,新节点加入到系统中,但不参与投票,leader依然会将日志复制给它们。直到新节点的日志赶上其它节点,才会进入配置变更阶段。
- leader 可能不是新配置节点中的一员。在这种情况下,leader 一旦提交了$C_{new}$配置的日志记录(复制到大多数)就会退位(回到 follower 状态)。然后新配置中的节点将被选为leader,在此之前只有旧配置中的节点才会被选为leader。
- 被移除的节点可能会扰乱集群。这些节点因为没收到心跳提醒,会超时,然后开始新一轮选举,并发送带有新term号的RequestVote RPC请求给新配置下的节点,这会导致新配置下的leader变为follower状态。为了防止这个问题,当节点知晓当前leader存在时,它会拒绝RequestVote RPC请求,即使请求的term号更大。
根据上述集群变更机制,重新考虑图10中的情况。首先,4、5节点先要将日志追上进度,再参与投票。此时,作为leader的3节点收到集群变更的命令,但它只将$C_{old,new}$配置记录发送到4、5节点,就失效了。然后,1节点(它并不知道4、5节点,但获得1、2节点的投票)成为新的leader。此时,5节点也收到3、4、5节点的投票,但它不能成为leader,因为它还要得到旧配置(1、2、3节点)中大多数节点的同意。
7 Log compaction
Raft中,日志会越来越长,这会导致日志占用空间越来越大,重新执行日志花费的时间也会更长。为了防止日志无限增长,Raft需要压缩日志。
快照是最简单的压缩方法。系统会将当前状态以快照方式持久化存储,而该时间点前的日志全部丢弃。
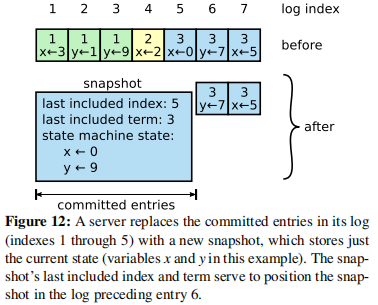
Raft中的快照机制如下图。每个节点独立地生成快照,具体工作是将状态机的当前状态存储到快照中,因此只有已提交的日志记录才会被快照替代(已提交才会被状态机执行)。Raft也会在快照中保存相关元数据:last included index是被快照替代的日志序列中最后一个记录的索引,last included term是被快照替代的日志序列中最后一个记录的term号,它们主要用于支持AppendEntries RPC请求时的一致性检查。为了支持集群成员变更,还会包含被快照替代的日志序列中最后一条配置信息。一旦快照成功保存,节点会删除包括last included index在内的之前所有日志记录。
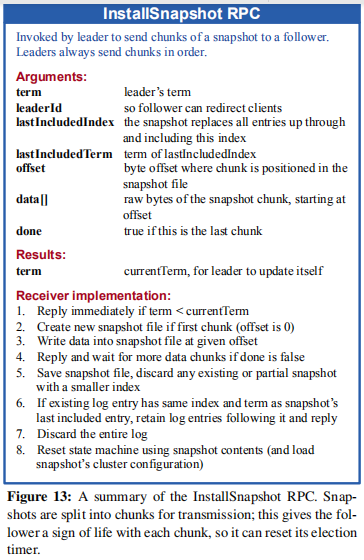
当leader需要发送已被快照替代的日志记录给某些follower时,它应该发送快照给对方,这种情况发生在某些follower较慢或刚加入集群时。
leader使用InstallSnapshot RPC请求(如下图)发送快照给一些落后的follower。当follower收到InstallSnapshot RPC请求时,它会丢弃快照之内的日志记录,只保留不在快照中的剩余记录,若已提交索引小于快照最后索引,还会更新自己的已提交索引,最后将快照应用到状态机中。
8 Client interaction
当一个客户端初次启动时,它会随机连接到一个节点。若节点并非leader,它会返回当前leader节点的信息给客户端。如果leader宕机了,客户端会请求超时,然后再尝试连接一个随机节点。
Raft需实现线性语义化(linearizable semantics),即一条指令只执行一次。实际情况中,一条指令可能执行多次,比如leader执行完某条指令,但在响应客户端时宕机了,客户端会重试连接,并重新发送这条指令,那么这条指令就会被执行两次。解决方法是对每条指令附加一个唯一标识,当状态机收到一条标识重复的指令时,它会直接返回而不执行。
只读操作不需要写入到日志中,但是系统可能会返回过期的数据,比如:响应只读请求的leader可能不知道新leader已经出现了,因为不产生日志则不需要发送日志复制请求。Raft采取两个额外措施来解决这个问题:
- leader必须知道哪些记录是已提交的。根据特性,leader一定包含所有已提交记录,但新leader一开始并不知道哪些记录是已提交的。对此,Raft要求每个leader在任期开始时,提交一个空的no-op类型的日志记录。
- leader在处理只读请求之前,必须检查自己是否已过时。Raft要求leader在响应只读请求时,必须向集群内过半节点请求并响应一次心跳信息。
9 Implementation and evaluation
略。
10 Related work
略。
11 Conclusion
略。
12 Acknowledgments
略。